



Specification:
Brand name: HAKRC
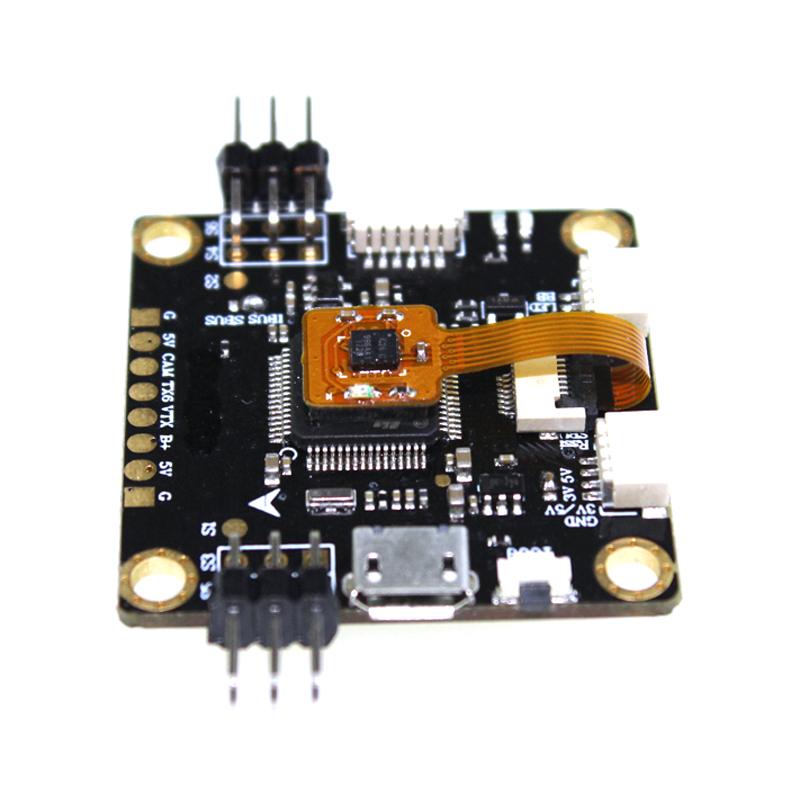
Item name: Omnibus F4 V3 Flight Controller + PDB
Flight controller
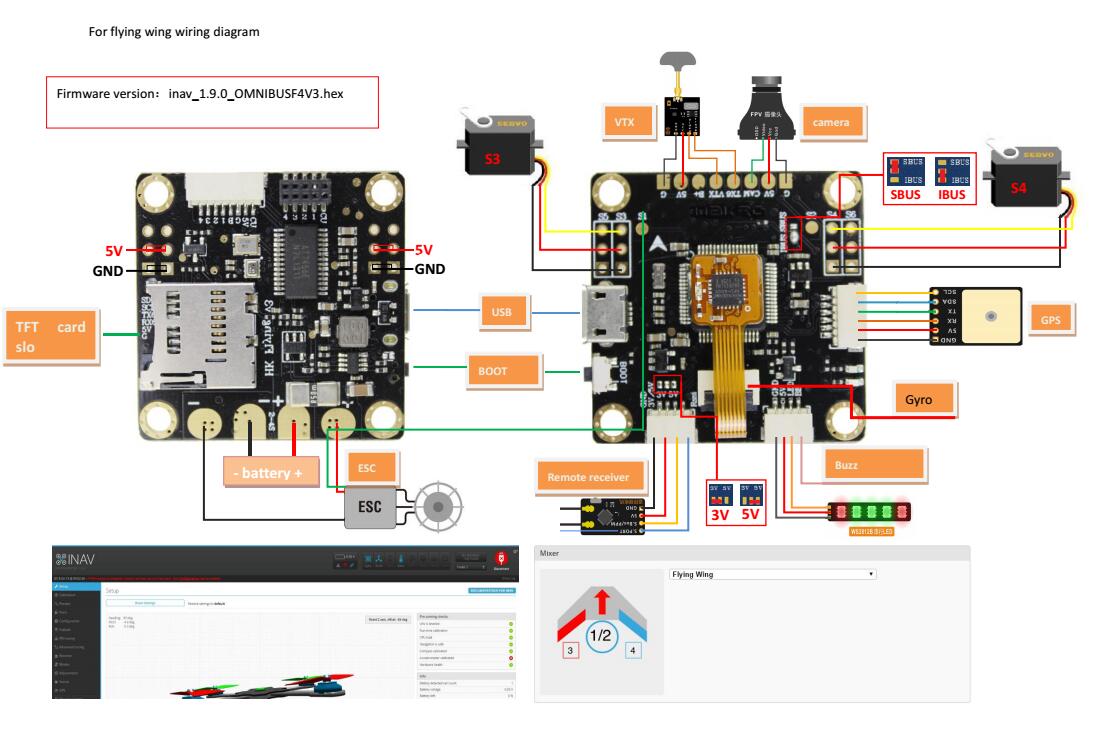
Firmware: inav_1.9.0_OMNIBUSF4V3.hex
MCU: 168MHz STM32F405
External IMU: ICM20608(The default IMU is ICM20608, you can also choose MPU6000)
Baro: BMP280 (I2C)
OSD: BetaFlight OSD w/ AT7456E chip
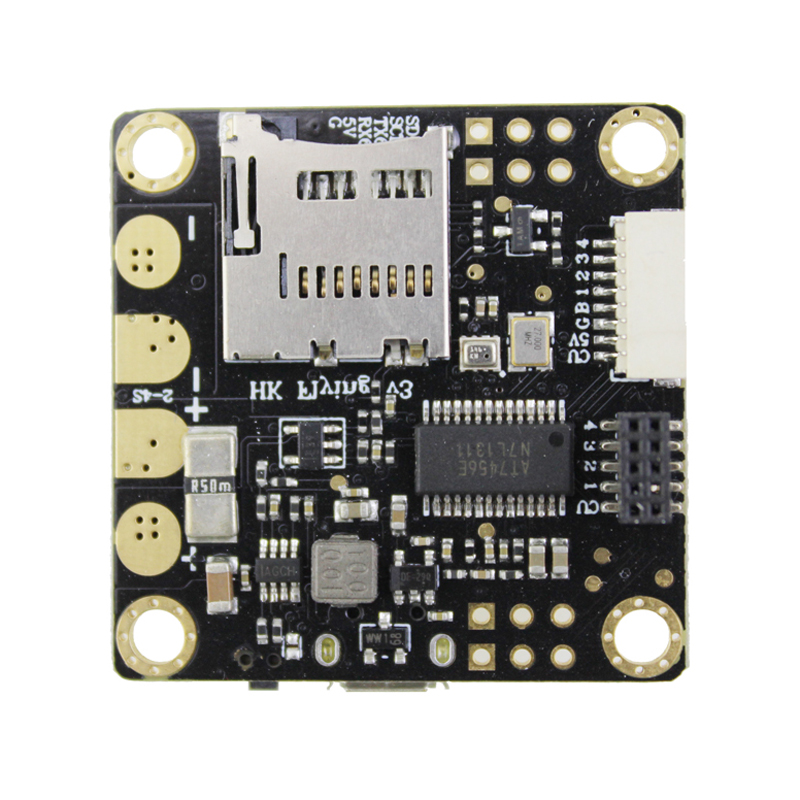
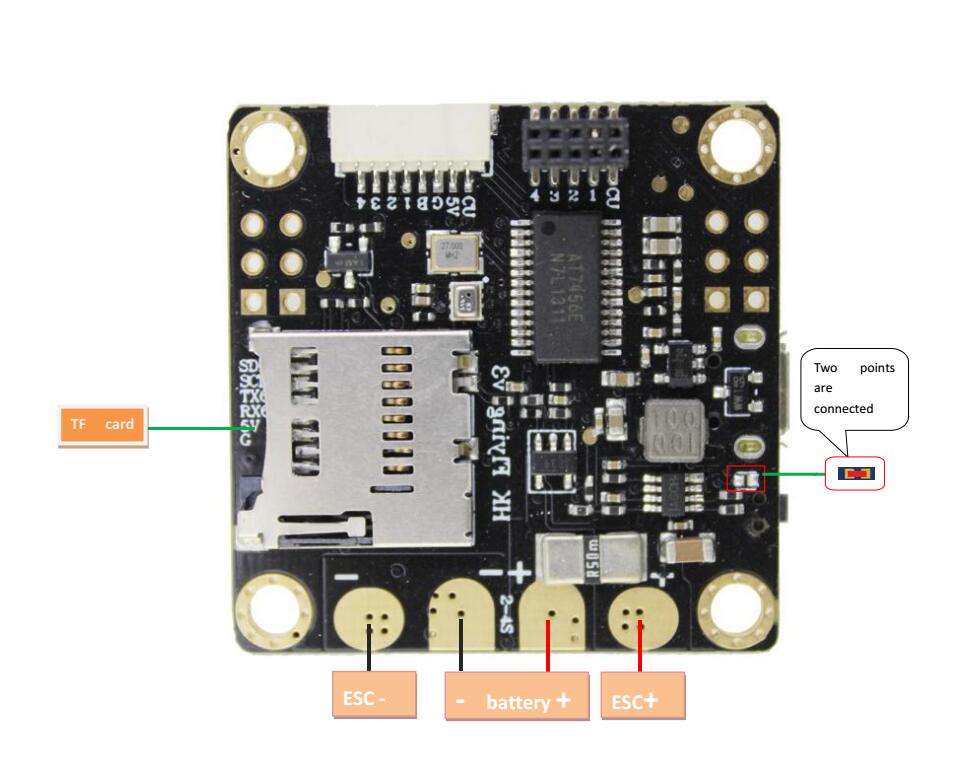
Blackbox: MicroSD card slot (SD/SDHC)
VCP, UART1, UART3, UART6
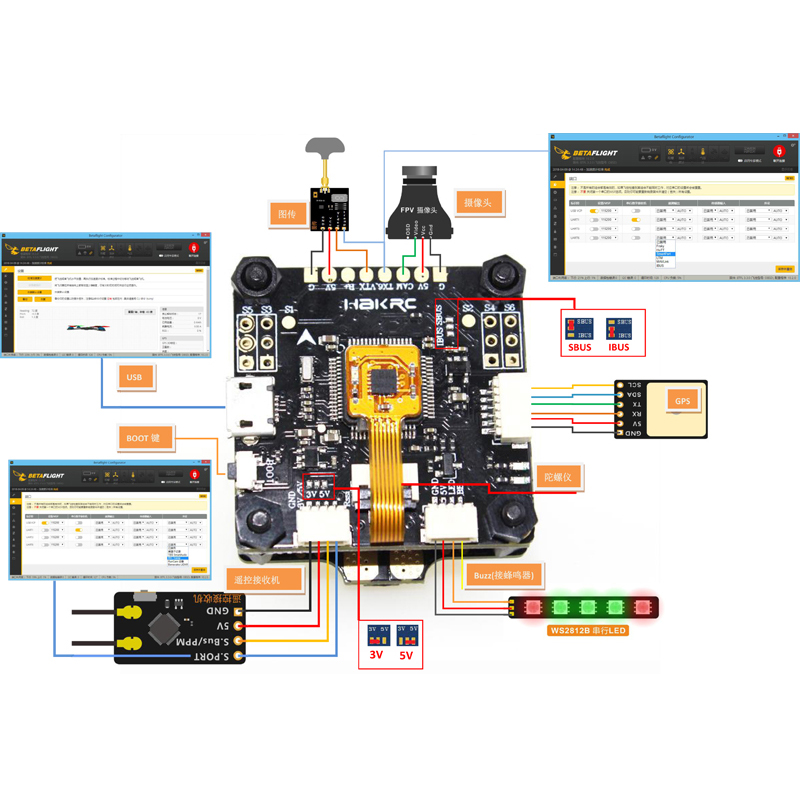
Built in inverter for SBUS input (UART1-RX)
PPM/DSM/IBUS/UART Shared: UART1-RX
SoftSerial on TX6
Smartaudio & Tramp VTX protocol supported
WS2812 Led Strip : Yes
Beeper : Yes
RSSI: Yes
Product size: 36*36*6mm
Mounting hole: 30.5x30.5mm
Product weight: 8g
Packing size: 62*58*17mm
Package weight: 32g
PDB Board
Input: 6~20V (3~4S LiPo) w/TVS protection
PDB: 2x30A (Max.2x46A),
BEC: 5V /3A cont. (Max.3A)
LDO 3.3V: Max.100mA for Spektrum RX
Current Sensor 100A
Battery Voltage Sensor: 1:10
Package Included:
1 x Omnibus F4 V3 Flight Controller + PDB