Specification:
Item Name: iFlight
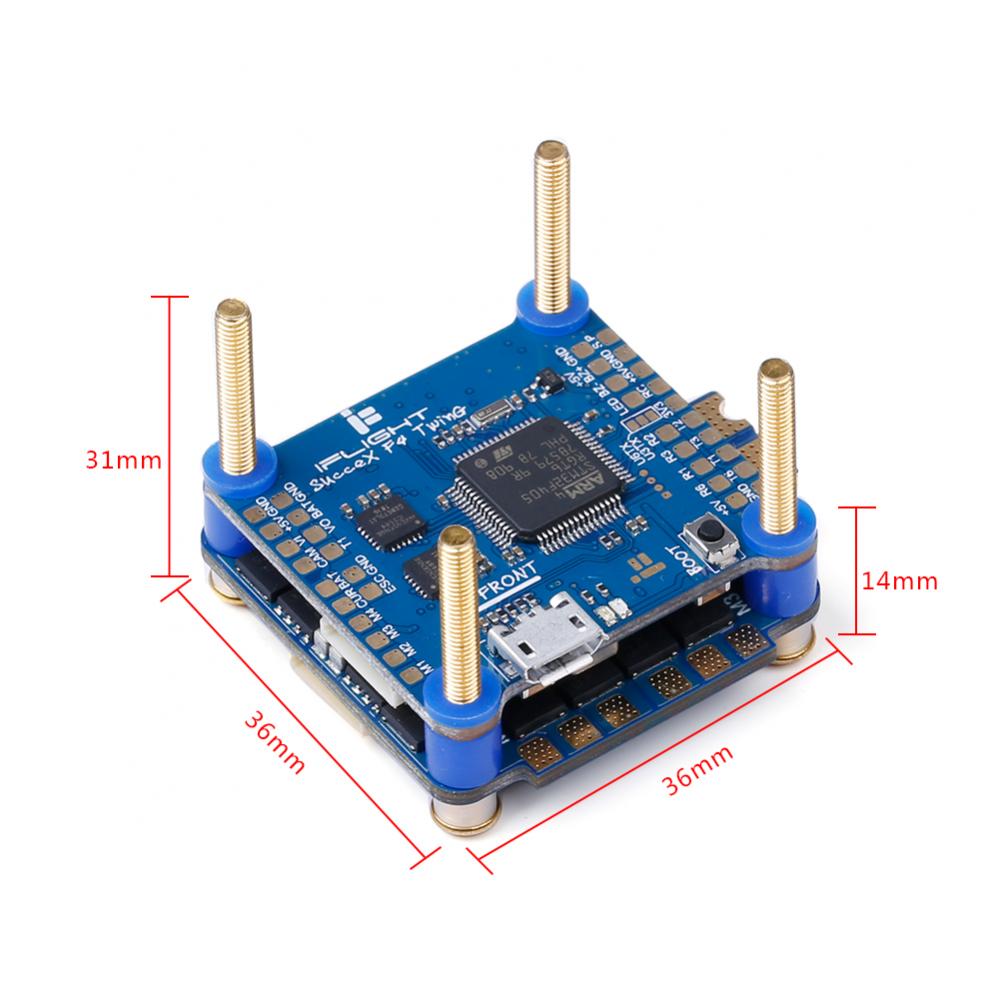
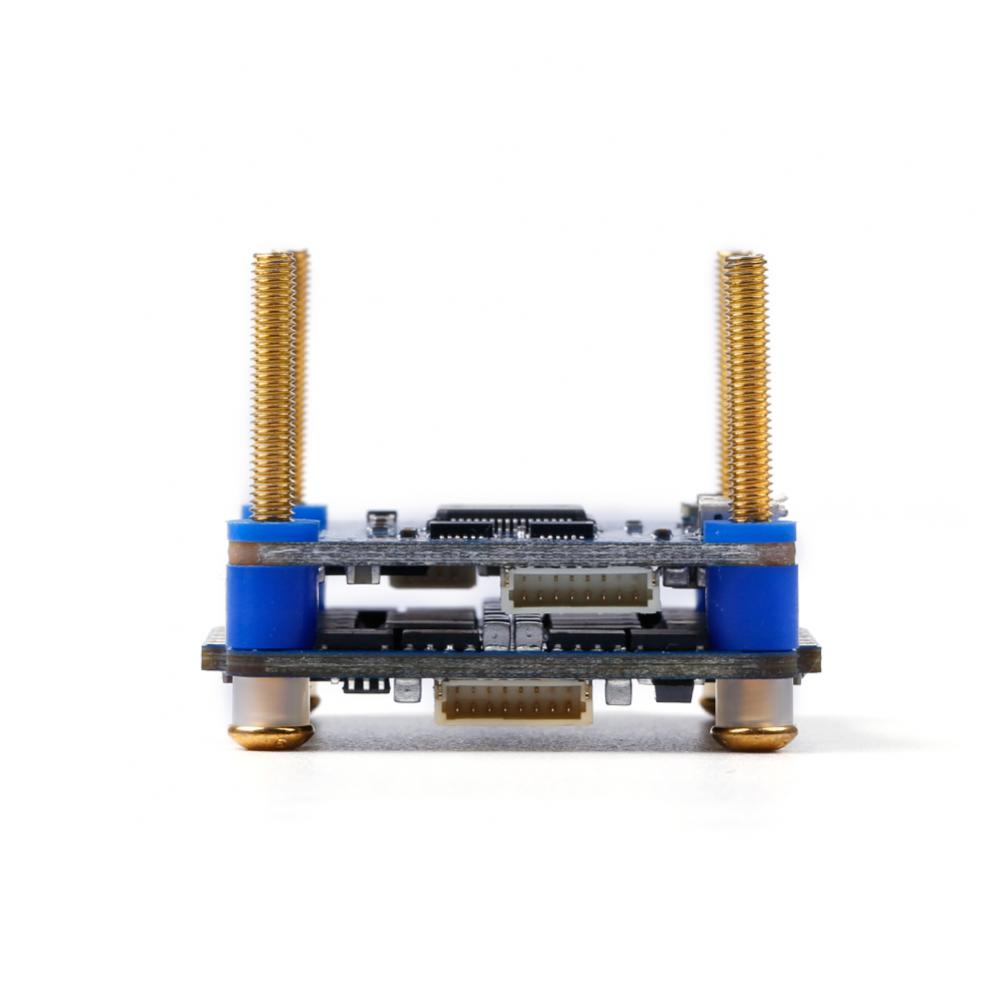
Model: SucceX F4 TwinG Stack
Item Name: Dual Gyro F4 Flight Controller & 50A BLheli_32 4In1 ESC Stack
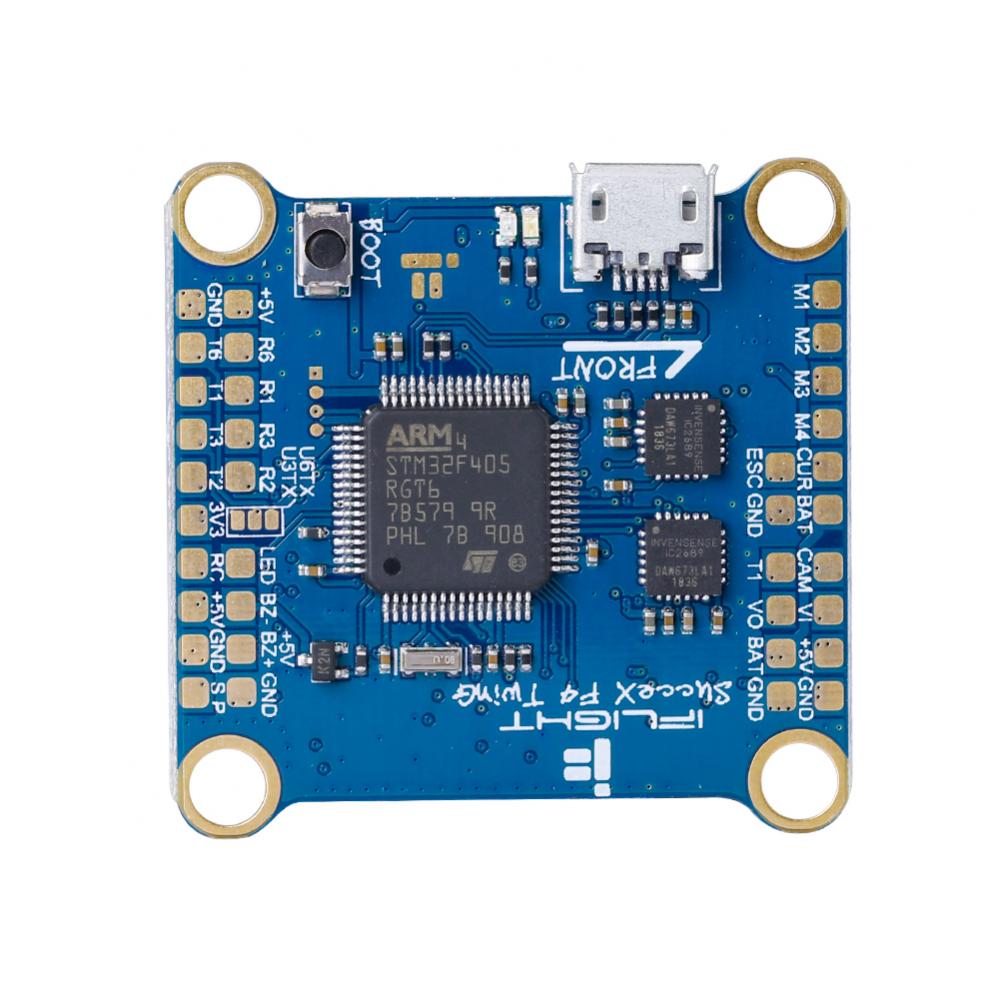
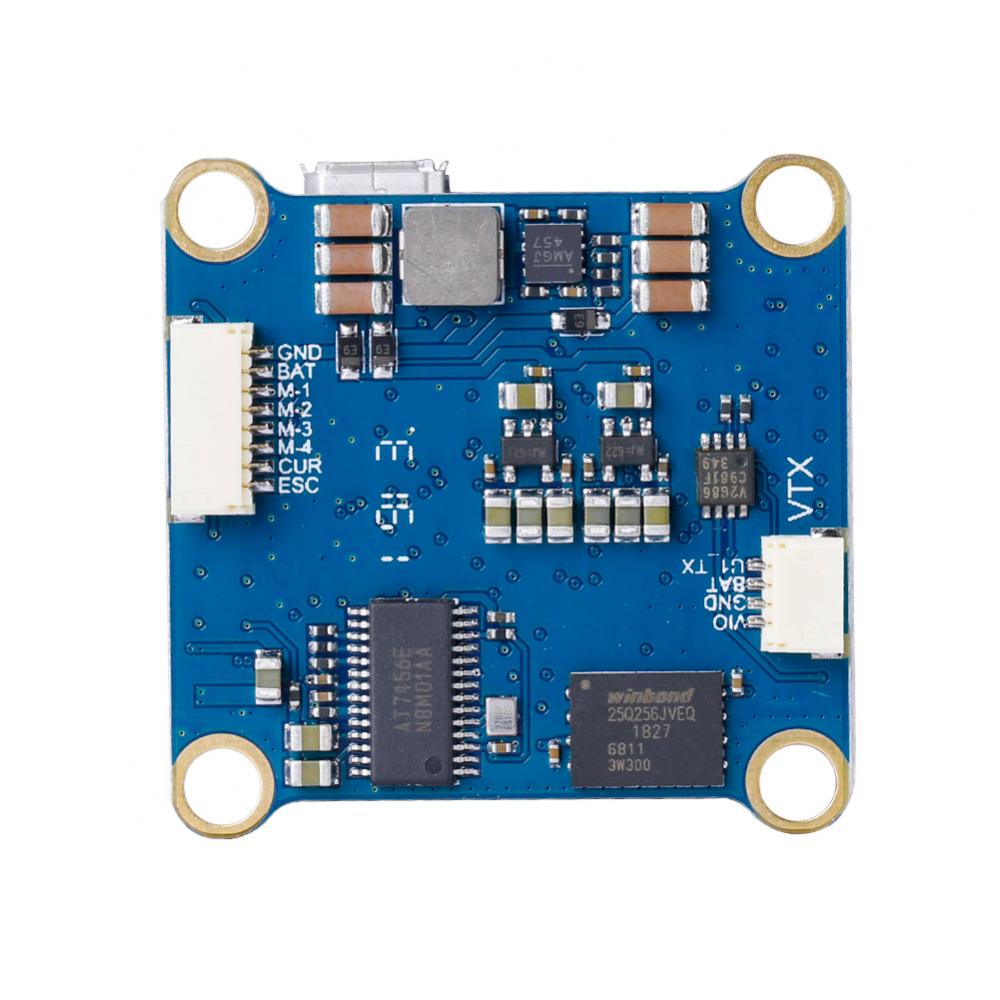
SucceX F4 TwinG Flight Controller
Input Voltage: 2-6S (5-36V)
MCU: STM32F405R6T6
IMU: Twins IC2689,Twins Gyros built-in (SPI)
OSD: AT7456E
Blackbox: Blackbox logging device
BEC: 5V@ 3A
Firmware: Betaflight/INAV
BEC: 5V@ 3A
Firmware: Betaflight/INAV
Target: STM32F405
FC: IFRC/IFF4_TWIN_G(STM32F405)
Size: 36x36mm
Mounting Hole: 30.5x30.5mm ( φ4mm with Grommets φ3mm)
Weight: 6.3g
Size: 36x36mm
Mounting Hole: 30.5x30.5mm ( φ4mm with Grommets φ3mm)
Weight: 6.3g
- 5X Uarts (1 2 3 4 5) with build-in inversion
- 8X Dshot/Proshot/Oneshot output
- 8X individual ESC power/ signal pads
- 1X Group of Gnd/Vbat/M1/M2/M3/M4/Cur/TX
- Smart audio & Tramp VTX protocol: Support (IRC Tramp)
- WS2812 led Strip: Suppor
- Beeper: Support
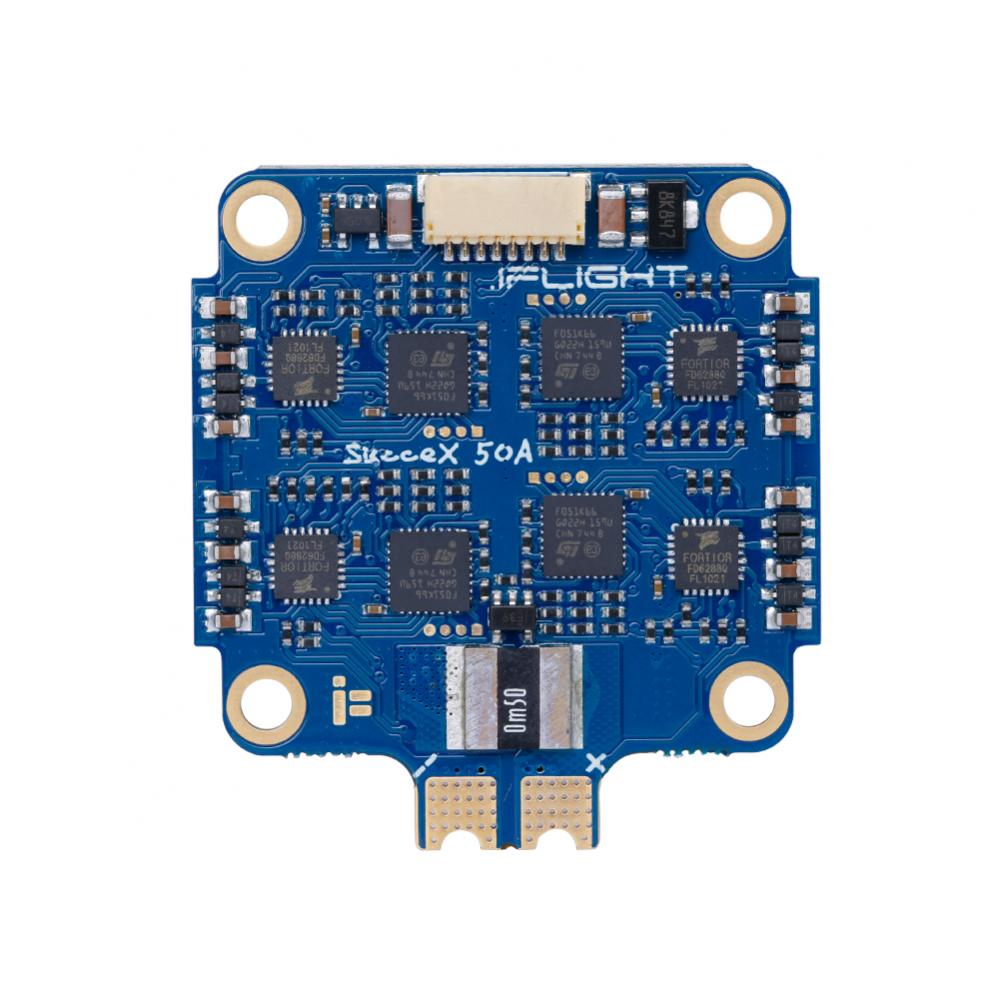
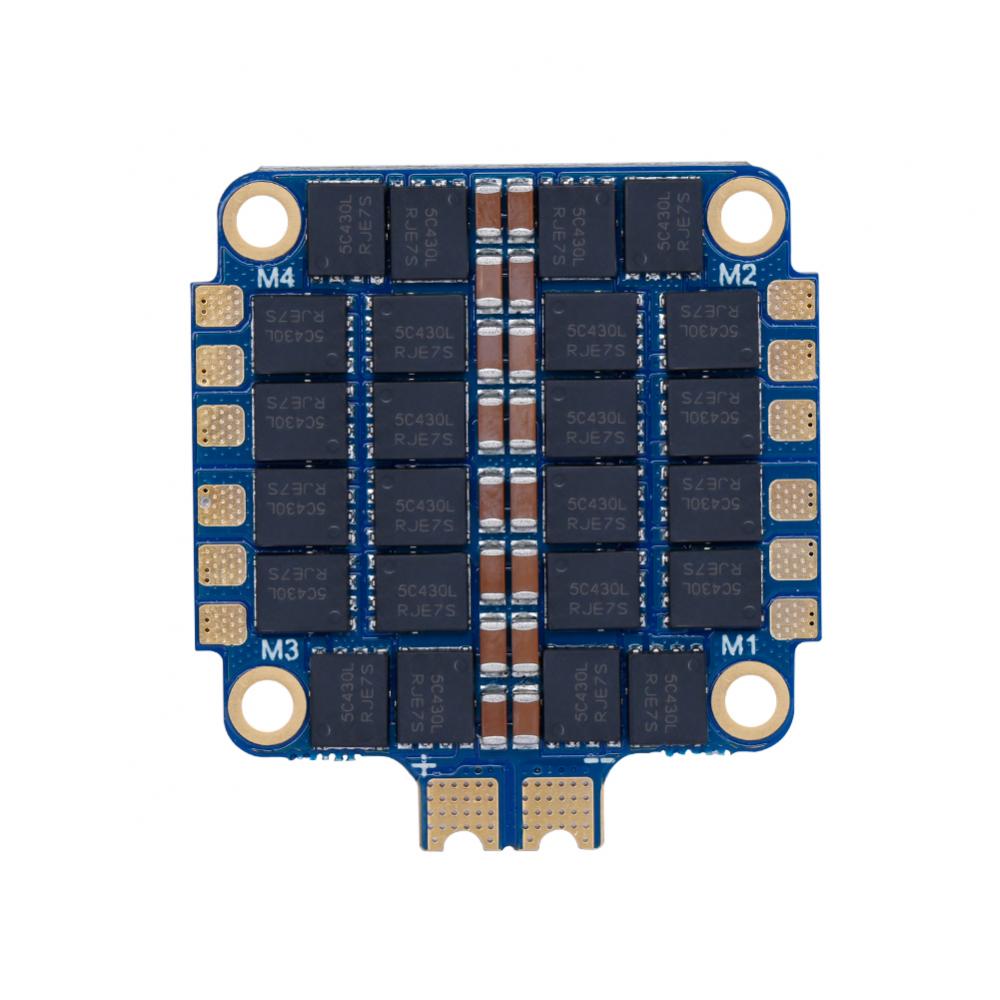
SucceX 50A 2-6S BLHeli_32 Dshot1200 4in1 ESC
Optional Version: Normal ( Without Heat Sink Module) ;
Advanced ( With Heat Sink Moudle)
Dimension: 43*39mm
Mounting Holes: 30.5*30.5mm/Φ3mm
Weight:14.4g
Supports 2-6S lipo input
STM32F051 MCU, 48Mhz Runs BLHELI 32.X Firmware
Current sensor: Yes
BEC: No
Supports: DShot DShot150/300/600/1200/MultiShot/ OneShot etc.
Target: iFlight-BL32-4IN1
Features:
- 8 layers double-sided PCB board;
- 4oz 1.6mm thick power board(0.9mm copper ratio),better operating load capacity;
- 32bit FO51K86 MCU, 48mHz maximum clock speed;
- MLCC Low ESR ceramic capacitors;
- Top grade NTMFS5C430NL MOSFET;
- Rational layout, countersunk holes on extended solder pads to ensure PCB layer connection
1x 50A 4In1 ESC
TwinG Gyro Setup
-The Betaflight target's default setting is ‘gyro_to_use = both’ / Gyro fusion is active!
-To check the current setting, please use CLI and type ‘get gyro’ to find the responding entry.
-Change the settings with ‘set gyro_to_use = ’ and type ‘save’.
-To get the most reliable performance or encounter noise, oscillation and bent props: Please use the default setting ‘both”.
-For Single Gyro use, please use the debugging options to find and tune for the cleaner gyro, but lose the dynamic fusion and averaging.
-BF offers the following dual gyro debug options: dual_gyro_raw, dual_gyro, dual_gyro_diff, dual_gyro_combined.
-BlackboxLog explorer graph: dual_gyro_raw Debugging = [0] Roll Gyro1, [1] Pitch Gyro1, [2] Roll Gyro2, [3] Pitch Gyro2.
-The displayed graph will show the Gyro_Raw reading (no filters applied), both gyros can be compared.
Package Included:
1x F4 Flight Controller Board
RECOMMENDATION:
- No additional capacitor needed up to 5S!
- To encounter back EMF and ensure the longevity of your electronics, min. 220uF Cap 35V for 4-5S, 50V for 6S on your main lead!
1x F4 Flight Controller Board
1x bag of Screws
1x bag of Cables