Description:
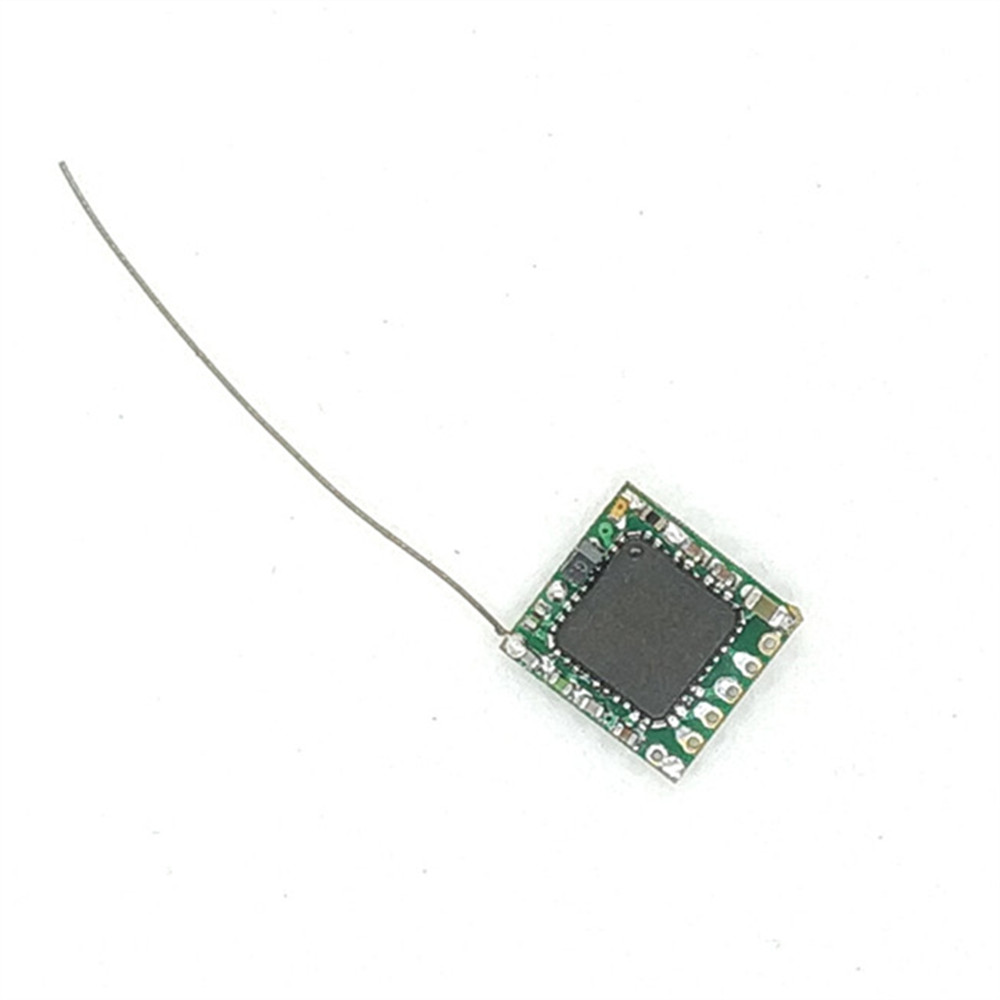
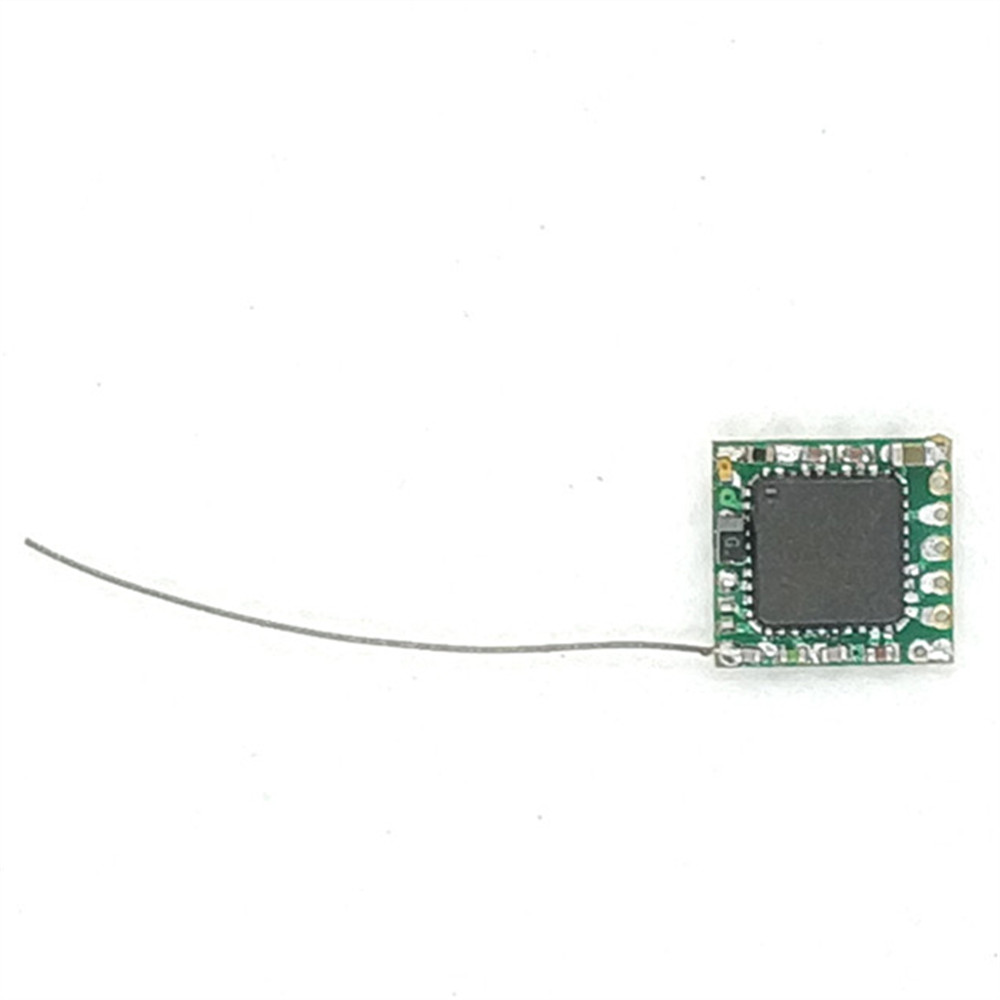
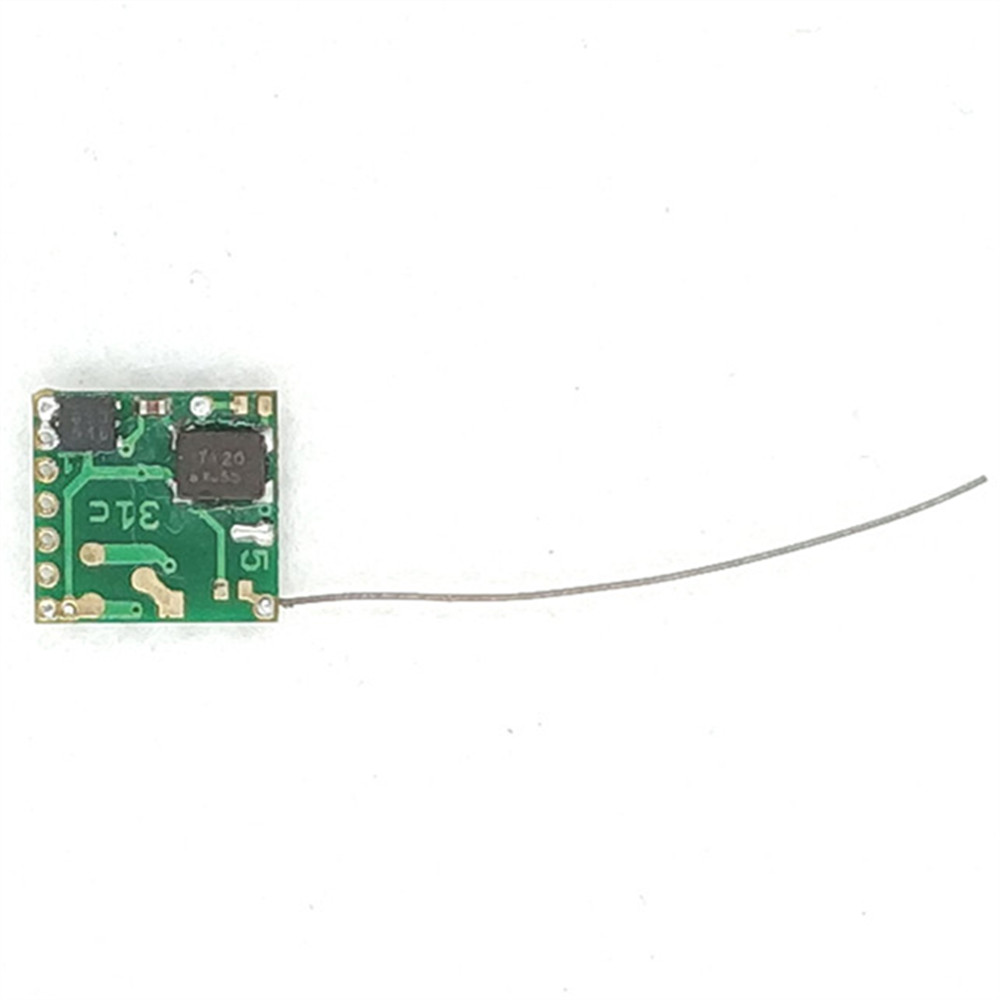
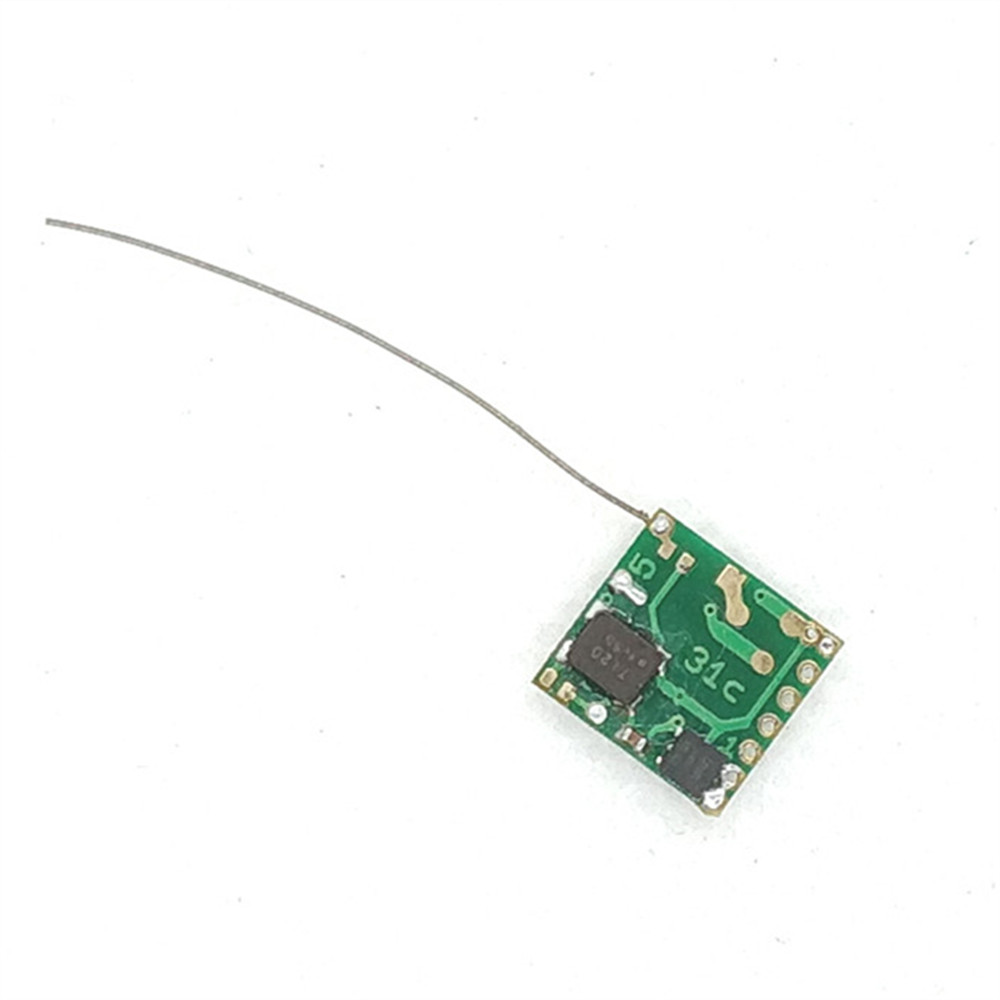
Item Name: DSMX/DSM2 6CH Nano RC Receiver
Channels: 6 channels
Power: 3-10V DC
Antenna Length: 30mm
Product Size: 9.9mm*9.2mm*2.5mm
Product Weight: 0.3g
Package Included:
1 x DSMX/DSM2 6CH Nano Receiver
Signal Output:
CH1 - CH6 output normal servo signal
GENERAL:
3-10v may be connected with correct orientation to +/- points.
The Rx is not insulated so take care to avoid short circuits.
The PCB is thin so do not bend it or exert great force on it.
LED STATUS:
Led On = perfect reception (real-time indicator).
1 flash = Scanning (~2sec between flashes; wrong model if never stops).
2 flash = Brownout (receiver voltage went too low; check battery/servo load)
FAILSAFE:
Outputs are not driven (do nothing) on startup and while scanning.
Outputs 'hold' on short signal losses (<1sec) and then do nothing (>1s).
BINDING:
1. Switch Rx on and wait ~20s until led flickers fast.
2. Switch Tx on in bind mode and Rx led should flash slowly and then go solid.
3. Change distance between Tx/Rx if binding does not work.
SERVO OUTPUTS:
Pads 1-6 will normally be used for servos
Item Name: DSMX/DSM2 6CH Nano RC Receiver
Channels: 6 channels
Power: 3-10V DC
Antenna Length: 30mm
Product Size: 9.9mm*9.2mm*2.5mm
Product Weight: 0.3g
Package Included:
1 x DSMX/DSM2 6CH Nano Receiver
Signal Output:
CH1 - CH6 output normal servo signal
GENERAL:
3-10v may be connected with correct orientation to +/- points.
The Rx is not insulated so take care to avoid short circuits.
The PCB is thin so do not bend it or exert great force on it.
LED STATUS:
Led On = perfect reception (real-time indicator).
1 flash = Scanning (~2sec between flashes; wrong model if never stops).
2 flash = Brownout (receiver voltage went too low; check battery/servo load)
FAILSAFE:
Outputs are not driven (do nothing) on startup and while scanning.
Outputs 'hold' on short signal losses (<1sec) and then do nothing (>1s).
BINDING:
1. Switch Rx on and wait ~20s until led flickers fast.
2. Switch Tx on in bind mode and Rx led should flash slowly and then go solid.
3. Change distance between Tx/Rx if binding does not work.
SERVO OUTPUTS:
Pads 1-6 will normally be used for servos